第2部 展示解説 動物界
哺乳類の多様性と
標本から読み取ること
概論 哺乳類とは
哺乳類という呼び方はミルクを与えて子供を育てることに由来するが、これは哺乳類の大きな特徴である。 ミルクは栄養のバランスもよく消化もしやすく栄養学的にすぐれている。幼い動物と成体とでは生理的にも行動学的にもさまざまに違いがあるが、多くの動物では幼い個体も成体と同じような食物を摂取しなければならないため多くの無理を強いられる。この点、哺乳類の幼獣は哺乳されることによって初期死亡率が低下す る。これに関連して産子数が少なく、少数の子をよく世話をして育てるのも哺乳類の特徴である。このことは個体群学的および行動・社会学的な特性をもたら す。 哺乳類は幼獣が成獣になるまで時間をかけるが、 その行動にはほかの動物群に比べて後天的要素が大 きい。複雑な個体間関係や狩りのテクニック、逃走の方法などは学習によって獲得される。これらには高い知能が不可欠である。
形態学的には骨格や歯の複雑さも晴乳類とその他の動物群を区別する特徴のひとつであるが、体毛をも っていて鳥類とともに恒温性であることも大きな特徴である。このことは低温での生理活動に安定性を確保 し、夜行性や高緯度地域での安定的生息を可能にした。哺乳類の種数は 4000 ほどであり、昆虫の 17万種に比べればとるに足らないほど少数派である。にもかか わらずその生息地は地上の森林、草原、砂漠、あるいは地中、川、湖、海、さらには空中にまでおよび、その形態や生活様式の多様さは目をみはるばかりである。
哺乳類の四肢
哺乳類の脊椎を家の梁にたとえれば、四肢はそれを支える 4本の柱といえる。すなわち肩から前肢が、腰から後肢が出て胴体を支えている ( 図 1) 。
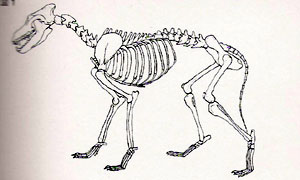
前肢は肩甲骨から関節でつながる上腕骨が出て、尺骨・橈骨を経て前足の指骨にいたる。指骨は基本的には 5本である。後肢は寛骨から球状の関節でつながる大腿骨が出て、頸骨・腓骨を経て、後足の指骨にいたる。足の骨の基部には踵骨がある。これを基本型とし、生活様式に応じてさまざまな変化が認められる。
前肢を使って歩く限り、前肢は「脚」であるが、後肢で二本足立ちして歩く ( 二足歩行 ) 場合、前肢は「腕 」となる。ヒトはその代表だが、二足歩行をするカンガ ルーの前肢も腕と呼ぶべきものである。 また樹状生活をする霊長類は多かれ少なかれ前肢が腕的である。 ヒトを例にみると、腕には先端に手、つまり掌と指がある。手はものをつかむ働きをする。そのことだけをとりあげると、多くの霊長類の足は「手」的である ( 図 2) 。

通常は四足歩行するリス、 マーモット、プレーリードッグなどが後足立ちで前肢をつかって食物を食べるが、この前肢はまさに腕である。魚をつかむカワウソや、貝を割るラッコの前肢なども同様である。 一方、手の歩くのに使われない点に注目すれば、つかむことをしなくても木にぶら下がるナマ ケモノの前肢は腕と呼ぶべきものであろう ( 図 3)。以上のように、状況によって前肢を腕的にも使う哺乳類はかなり多い。
水中生活は地上とはまったく違うため、前肢は泳ぐことに適した形態となる。水中生活をするカワウソ、ラッコ、ビーバーなどでは骨に大きな特殊化はないが、指のあいだに水掻きがあって水中での推進力を増している。鰭脚類の前肢は魚の鰭のようである。そのため腕の骨は短く、指骨は扇状に拡がっている ( 図 4) 。

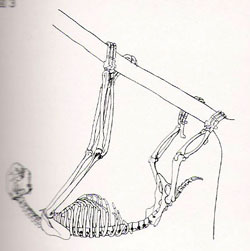
アザラシ類は鰭状の後肢を左右交互に動かし、腰椎を上下させて推進力をつけて水中を巧みに泳ぐが、それだけ地上の動きは不得意で、前肢で体を進め、後半身をひきずるように動かす。これに対してアシカ類 は水中を「胸鰭」ではばたくように進む。陸上での歩行は四肢で体を支え、首を前後に振りながら進む。海牛目も前肢は鰭状となり、後肢は退化している。クジラ目はさらに徹底しており、腕の骨 (榛骨と尺骨 ) が面的になり、他の指骨とともに一枚の鰭となっている ( 図 5) 。 こうなると原型である食肉目型の前肢との関係はかろ うじて辿れるとしても、他の特殊化を果たしたウマの前肢とは共通点を見い出すのが困難なほど違うものとなっている。

翼手目では前肢が飛朔のために特殊化し、脛骨、指骨が異様に長い ( 図 6) 。
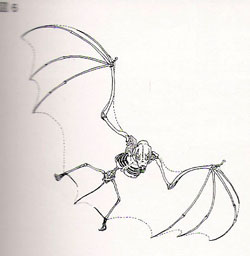
ことに第 3指が長く、これだけで体長に匹敵するコウモリもいる。これは飛ぶのにはよいが、着地したときにはかえって邪魔になるため、第 1指がカギ爪のようになり ( 図 7) 、

これでものをつかむようにして前進する。皮翼目 ( 図 8) や
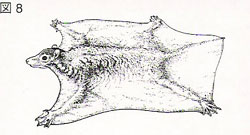
齧歯目のムササピ類は翼種目のようにはばたく飛翔はせず、滑空するだけだが、そのために四肢のあいだに飛膜をもつ。このためムササビの第 5 指は他の 4本の指とはまったく違い、針状軟骨が長く張り出している ( 図 9) 。

後肢は基本的に「歩く」つまり体を推進するためのものであり、その機能は前肢ほど多様ではない。ナマケモノのようにからだの推進が樹上であれば腕的になり、鰭脚目のように泳ぐのであれば鰭的になる。ただし前肢が完全に退化した哺乳類はいないが、鯨目では後肢が退化して消失している ( 図 85,90 参照 ) 。
後肢の先端、つまり「足」はカカト(踵骨) から先の、指を構成する中足骨、基節骨、中節骨、末節骨からなる。指骨は足の裏をついて歩く蹠行性の哺乳類ではしばしば長く、足の裏の面積が広い。このため柔らかい地面や雪の上でも沈みにくい。アルマジロ ( 図 10A) 、 ニホンザル ( 図 11A) などがこれに該当する。ノウサギの後足はとくに大きく、柔らかい雪の上でも速く走るこ とができる ( 図 11B) 。コヨーテやアナグマは中足骨が立ち上がる形となり、踵骨は地面につかない ( 図 10B, 11C) 。走ることに高度に特殊化した有蹄類では体重を分散させないために指骨の数が少なくなっている ( 図 10C) 。イノシシでは指骨が 4本だが ( 図 11D) 、ニホ ンジカ ( 図 11E) などでは 2 本となり、ウマにいたっては 1本となる。

